
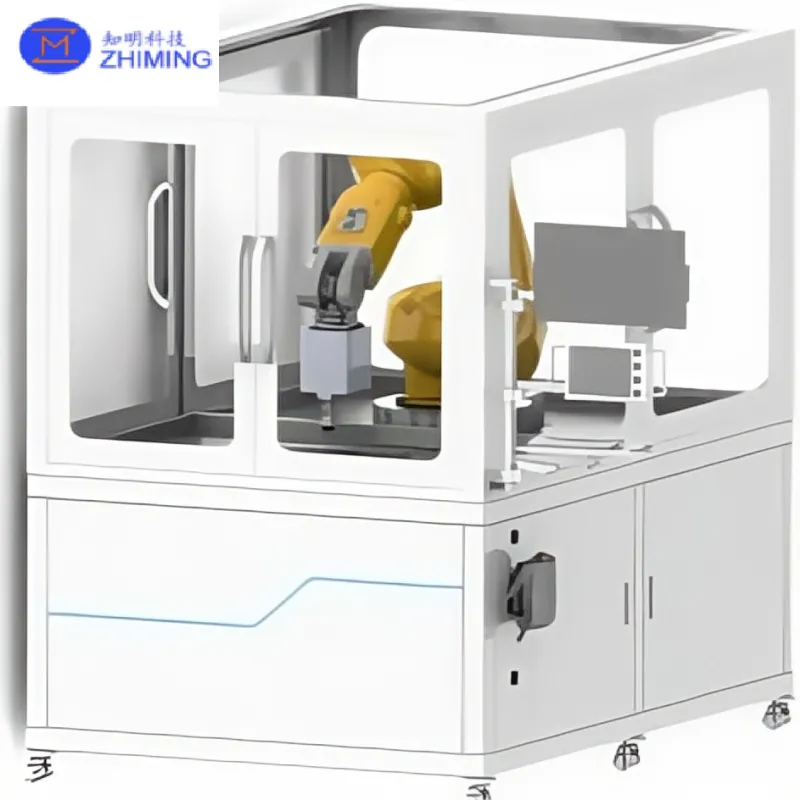



 Die Roboter-Poliermaschine ist ein hochpräzises automatisiertes System, das für das Polieren großer und komplexer optischer Oberflächen entwickelt wurde. Sie integriert eine 6-achsige Industrieroboterplattform (wie z. B. KUKA, ABB, oder Stäubli) mit fortschrittlichen Poliermodulen und intelligenter Steuerungssoftware.
Die Roboter-Poliermaschine ist ein hochpräzises automatisiertes System, das für das Polieren großer und komplexer optischer Oberflächen entwickelt wurde. Sie integriert eine 6-achsige Industrieroboterplattform (wie z. B. KUKA, ABB, oder Stäubli) mit fortschrittlichen Poliermodulen und intelligenter Steuerungssoftware.
Dieses System ermöglicht eine vollständig digitale optische Fertigung, die den gesamten Arbeitsablauf von der Oberflächenmodellierung und der Erzeugung von Werkzeugwegen bis hin zur Echtzeit-Kraftkontrolle und Prozessüberwachung abdeckt. Im Vergleich zum herkömmlichen manuellen Polieren bietet es eine höhere Konsistenz, verbesserte Effizienz und überlegene Oberflächengenauigkeit.
Wichtige technische Parameter
| Parameter | Spezifikation |
|---|---|
| Wiederholung der Positionierungsgenauigkeit | ±0,04 mm / ±0,05 mm / ±0,10 mm |
| Verarbeitungsdurchmesser | Φ50 - Φ2000 mm |
| Polierkopf-Typen | Airbag / Starr / Rad / Kombiniert |
| Spindeldrehzahl | Bis zu 1500 U/min |
| Kontinuierlicher Betrieb | ≥300 Stunden |
| Optionale Merkmale | Auto-Kalibrierung, Online-Überwachung, NC-Rundtisch |
Arbeitsprinzip



1. Koordinierte Bewegung mit sechs Achsen
Die Maschine nutzt die volle 6-Achsen-Roboterbewegung, um eine gleichmäßige Abdeckung komplexer Geometrien, einschließlich Freiformflächen und außermittiger Oberflächen, zu erreichen.
2. System zur Kontrolle der konstanten Kraft
Ein integrierter elektronischer Druckzylinder sorgt für eine stabile und anpassungsfähige Polierkraft und verhindert Überpolieren oder Oberflächenbeschädigungen.
3. Adaptive Drehachse
Die verstellbare Spindel passt sich automatisch der Oberflächenkrümmung an und ermöglicht die präzise Bearbeitung von Kugeln, Asphären und Freiformoptiken.
4. Sensor-Rückkopplung im geschlossenen Regelkreis
Die Echtzeitüberwachung durch Kraft- und Positionssensoren gewährleistet Prozessstabilität und Wiederholbarkeit.
5. Integration optischer Software
Die fortschrittliche Software unterstützt 3D-Modellierung, Simulation, Bahnoptimierung und Datenanalyse und bildet so eine komplette intelligente Polierlösung.
Wesentliche Merkmale
- Hochpräzise Kontrolle
Erzielt Oberflächengenauigkeit in optischer Qualität mit RMS < 10 nm - Flexibles Werkzeugsystem
Unterstützt mehrere Polierköpfe mit Schnellwechselfunktion - Vollständig automatisierter Arbeitsablauf
Von der Modellierung bis zur Inspektion sind alle Prozesse digital integriert - Langfristige Stabilität
Kontinuierlicher Betrieb bis zu 300+ Stunden - Intelligentes Überwachungssystem
Echtzeit-Diagnose und adaptive Steuerung gewährleisten sicheren Betrieb
Anwendung Industrien
Optik
- Teleskop-Spiegel
- Leistungsstarke Laseroptiken
- Optische Präzisionskomponenten
Luft- und Raumfahrt
- Satellitengestützte Bildgebungssysteme
- Optik für die Fernerkundung
Präzisionsfertigung
- Optische Halbleiterkomponenten
- Ultrapräzise Formen
Automobilindustrie
- Formen von Scheinwerfern
- Dekorative Hochglanzkomponenten
Typische Modelle
| Modell | Roboter-Basis | Genauigkeit | Durchmesser Bereich |
|---|---|---|---|
| IRP500S | Stäubli TX2-90L | ±0,04 mm | Φ50-Φ500 mm |
| IRP1000S | Stäubli TX200/L | ±0,05 mm | Φ80-Φ1000 mm |
| IRP2000A | ABB IRB6700 | ±0,10 mm | Φ200-Φ2000 mm |
Die wichtigsten Vorteile
- Ultra-hohe Oberflächenqualität
Optische Oberflächen mit Präzision im Nanometerbereich - Hocheffiziente Produktion
Mehrachsige Automatisierung reduziert die Bearbeitungszeit erheblich - Breite Kompatibilität
Geeignet für verschiedene Materialien und komplexe Geometrien - Reduzierte Arbeitskosten
Ersetzt das manuelle Polieren durch automatisierte Systeme - Skalierbare Fertigung
Sowohl für Forschung und Entwicklung als auch für die Massenproduktion geeignet
FAQ
Q1: Welche Arten von Oberflächen können bearbeitet werden?
A: Flache, sphärische, asphärische, außermittig asphärische und Freiformflächen.
F2: Welche Oberflächengenauigkeit kann erreicht werden?
A: RMS < 10 nm, erfüllt hohe optische Standards.
F3: Ist das System für große Optiken geeignet?
A: Ja, er unterstützt Durchmesser bis zu 2000 mm.
F4: Werden verschiedene Polierwerkzeuge unterstützt?
A: Ja, einschließlich Airbag-, starre und Rad-Polierköpfe.
F5: Welche Branchen profitieren am meisten?
A: Optik, Luft- und Raumfahrt, Halbleiterherstellung und Automobilindustrie.

Rezensionen
Es gibt noch keine Rezensionen.