
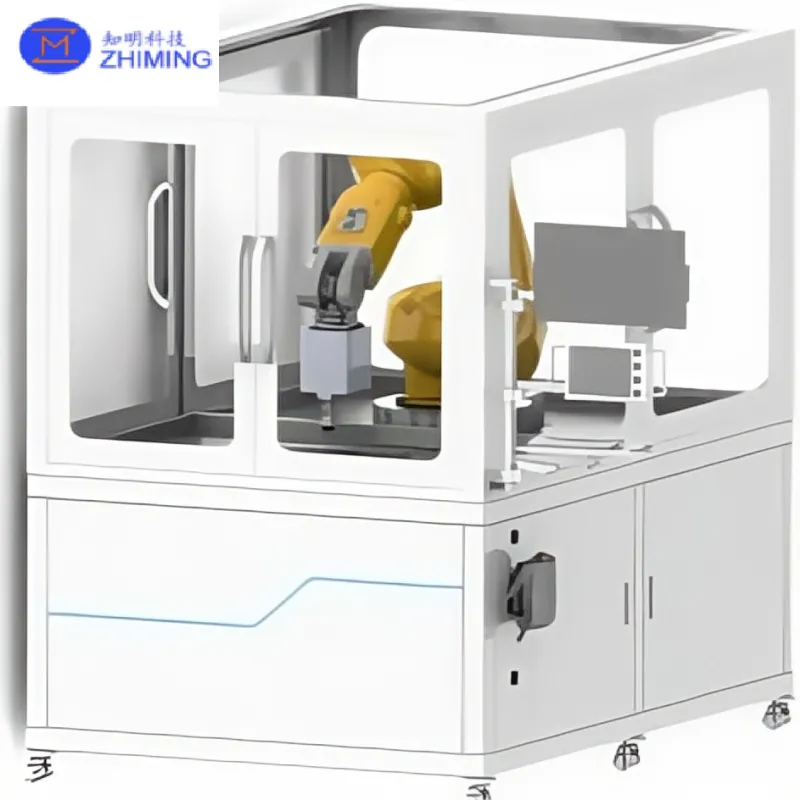



 La pulidora robotizada es un sistema automatizado de alta precisión diseñado para pulir superficies ópticas complejas y de gran tamaño. Integra una plataforma robótica industrial de 6 ejes (como KUKA, ABB, o Stäubli) con módulos de pulido avanzados y software de control inteligente.
La pulidora robotizada es un sistema automatizado de alta precisión diseñado para pulir superficies ópticas complejas y de gran tamaño. Integra una plataforma robótica industrial de 6 ejes (como KUKA, ABB, o Stäubli) con módulos de pulido avanzados y software de control inteligente.
Este sistema permite la fabricación óptica totalmente digital, abarcando todo el flujo de trabajo, desde el modelado de superficies y la generación de trayectorias de herramientas hasta el control de fuerzas en tiempo real y la supervisión del proceso. En comparación con el pulido manual tradicional, ofrece una mayor consistencia, eficiencia y precisión superficial.
Principales parámetros técnicos
| Parámetro | Especificación |
|---|---|
| Precisión de posicionamiento de repetición | ±0,04 mm / ±0,05 mm / ±0,10 mm |
| Diámetro de procesamiento | Φ50 - Φ2000 mm |
| Tipos de cabezales de pulido | Airbag / Rígido / Rueda / Combinado |
| Velocidad del cabezal | Hasta 1500 rpm |
| Funcionamiento continuo | ≥300 horas |
| Características opcionales | Autocalibrado, supervisión en línea, mesa giratoria NC |
Principio de funcionamiento



1. Movimiento coordinado de seis ejes
La máquina utiliza un movimiento robótico completo de 6 ejes para lograr una cobertura uniforme de geometrías complejas, incluidas superficies de forma libre y fuera del eje.
2. Sistema de control de fuerza constante
Un cilindro de presión electrónico integrado garantiza una fuerza de pulido estable y adaptable, evitando el pulido excesivo o el deterioro de la superficie.
3. Eje rotatorio adaptable
El husillo ajustable se alinea automáticamente con la curvatura de la superficie, lo que permite procesar con precisión esferas, asferas y ópticas de forma libre.
4. Retroalimentación del sensor de bucle cerrado
La supervisión en tiempo real mediante sensores de fuerza y posición garantiza la estabilidad y repetibilidad del proceso.
5. Integración de software óptico
El software avanzado admite el modelado 3D, la simulación, la optimización de trayectorias y el análisis de datos, formando una completa solución de pulido inteligente.
Características principales
- Control de alta precisión
Consigue una precisión de superficie de grado óptico con RMS < 10 nm - Sistema de utillaje flexible
Admite varios cabezales de pulido con capacidad de cambio rápido - Flujo de trabajo totalmente automatizado
Desde el modelado hasta la inspección, todos los procesos se integran digitalmente - Estabilidad a largo plazo
Funcionamiento continuo hasta Más de 300 horas - Sistema de vigilancia inteligente
El diagnóstico en tiempo real y el control adaptativo garantizan un funcionamiento seguro
Industrias de aplicación
Óptica
- Espejos de telescopio
- Óptica láser de alta potencia
- Componentes ópticos de precisión
Aeroespacial
- Sistemas de imágenes por satélite
- Óptica de teledetección
Fabricación de precisión
- Componentes ópticos semiconductores
- Moldes de ultraprecisión
Automoción
- Moldes de faros
- Componentes decorativos de alto brillo
Modelos típicos
| Modelo | Base robótica | Precisión | Diámetro |
|---|---|---|---|
| IRP500S | Stäubli TX2-90L | ±0,04 mm | Φ50-Φ500 mm |
| IRP1000S | Stäubli TX200/L | ±0,05 mm | Φ80-Φ1000 mm |
| IRP2000A | ABB IRB6700 | ±0,10 mm | Φ200-Φ2000 mm |
Principales ventajas
- Calidad de superficie ultra alta
Superficies ópticas con precisión nanométrica - Producción de alta eficacia
La automatización multieje reduce significativamente el tiempo de procesamiento - Amplia compatibilidad
Adecuado para diversos materiales y geometrías complejas - Reducción de los costes laborales
Sustituye el pulido manual por sistemas automatizados - Fabricación escalable
Adecuado tanto para I+D como para producción en serie
PREGUNTAS FRECUENTES
P1: ¿Qué tipos de superficies se pueden procesar?
A: Superficies planas, esféricas, asféricas, asféricas fuera de eje y de forma libre.
P2: ¿Qué precisión de superficie puede alcanzarse?
A: RMS < 10 nm, cumple las normas ópticas de gama alta.
P3: ¿Es adecuado el sistema para ópticas grandes?
R: Sí, admite diámetros de hasta 2000 mm.
P4: ¿Es compatible con diferentes herramientas de pulido?
R: Sí, incluidos los cabezales de pulido con bolsa de aire, rígidos y de rueda.
P5: ¿Qué industrias se benefician más?
R: Óptica, aeroespacial, fabricación de semiconductores y automoción.

Valoraciones
No hay valoraciones aún.